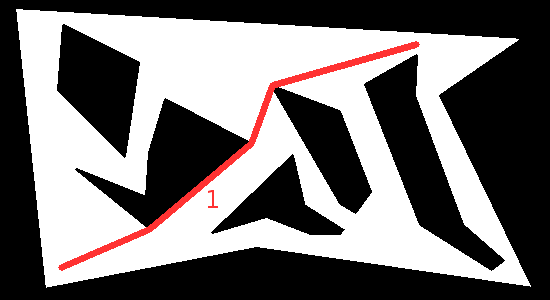
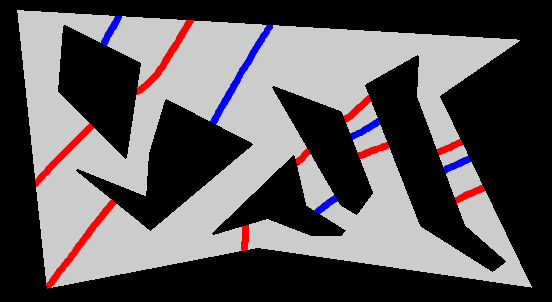
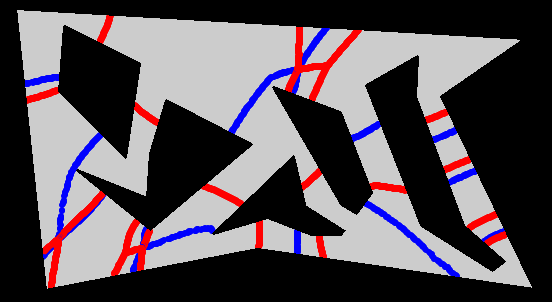
Problem: In a domain with polygonal boundaries, find the K shortest paths of different homotopy types between two points.
K = 1:
Topi Talvitie
Supervisor: Valentin Polishchuk
Problem: In a domain with polygonal boundaries, find the K shortest paths of different homotopy types between two points.
K = 1:
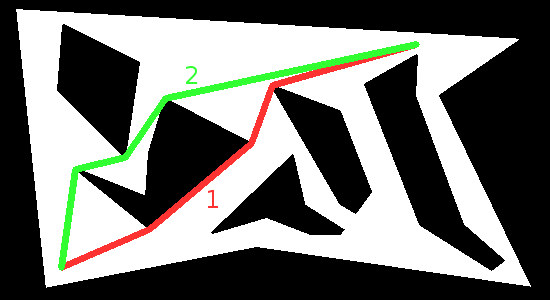
Problem: In a domain with polygonal boundaries, find the K shortest paths of different homotopy types between two points.
K = 2:
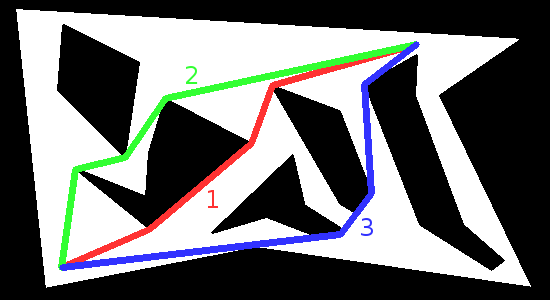
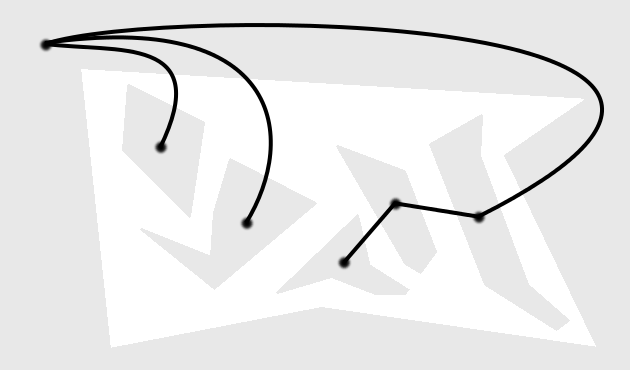
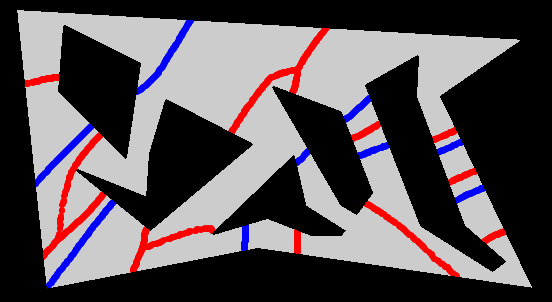
Problem: In a domain with polygonal boundaries, find the K shortest paths of different homotopy types between two points.
K = 3:
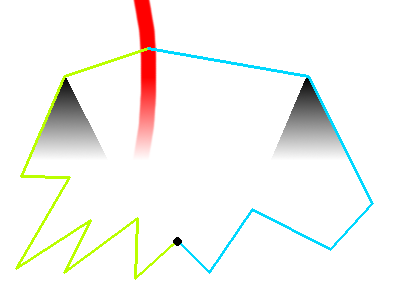
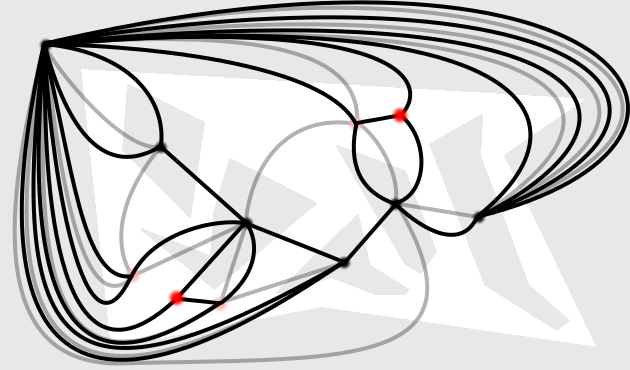
Use Dijkstra in "infinitesimally dense graph" on the domain
In practice, this is implemented by propagating circular wavefronts.
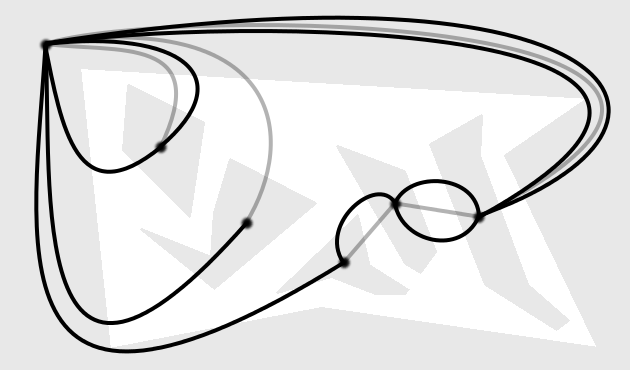
To find the K'th shortest paths we let colliding wavefronts continue, forming a "parking garage" structure:
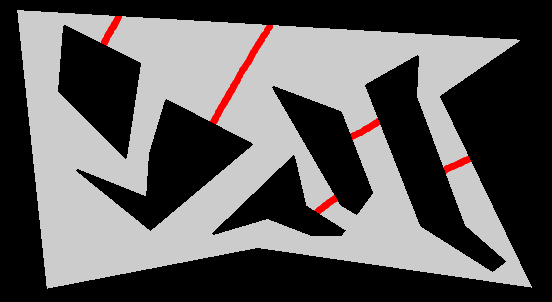
K'th Shortest Path Map (K-SPM) is a subdivision of the polygonal domain such that:
Example of a 1-SPM:
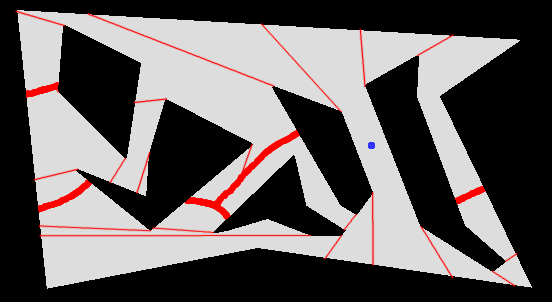
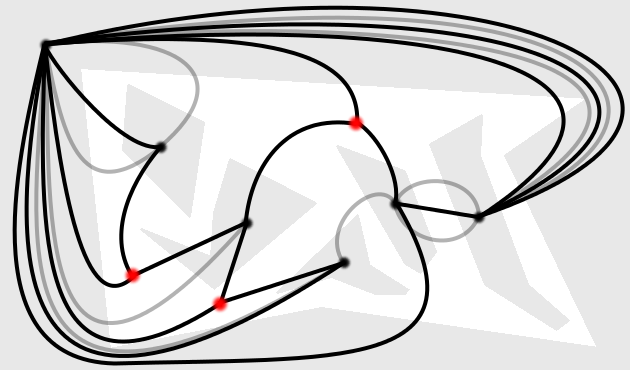
Two types of boundaries in K-SPMs:
| Changing homotopy type: Bisectors | Same homotopy type: Windows |
 |
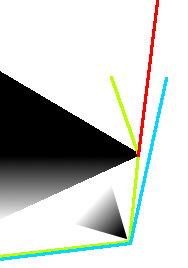 |
After bisectors have been found, windows are easy to add.
In the garage algorithm, collision points of the wavefronts form the bisectors of the K-SPMs!
Slides and visualization applet available in computational geometry group homepage!